图的基础操作¶
图的基础操作可分为对“边”的操作和对“顶点”的操作。在“邻接矩阵”和“邻接表”两种表示方法下,实现方式有所不同。
基于邻接矩阵的实现¶
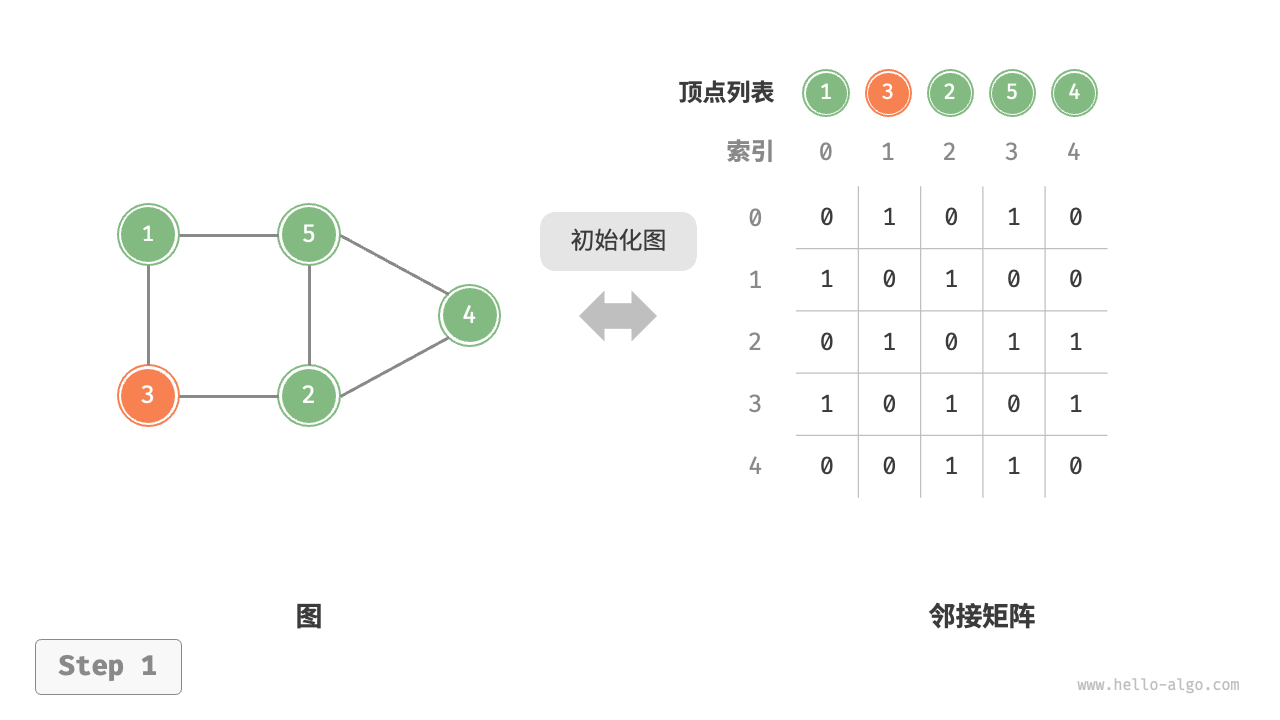
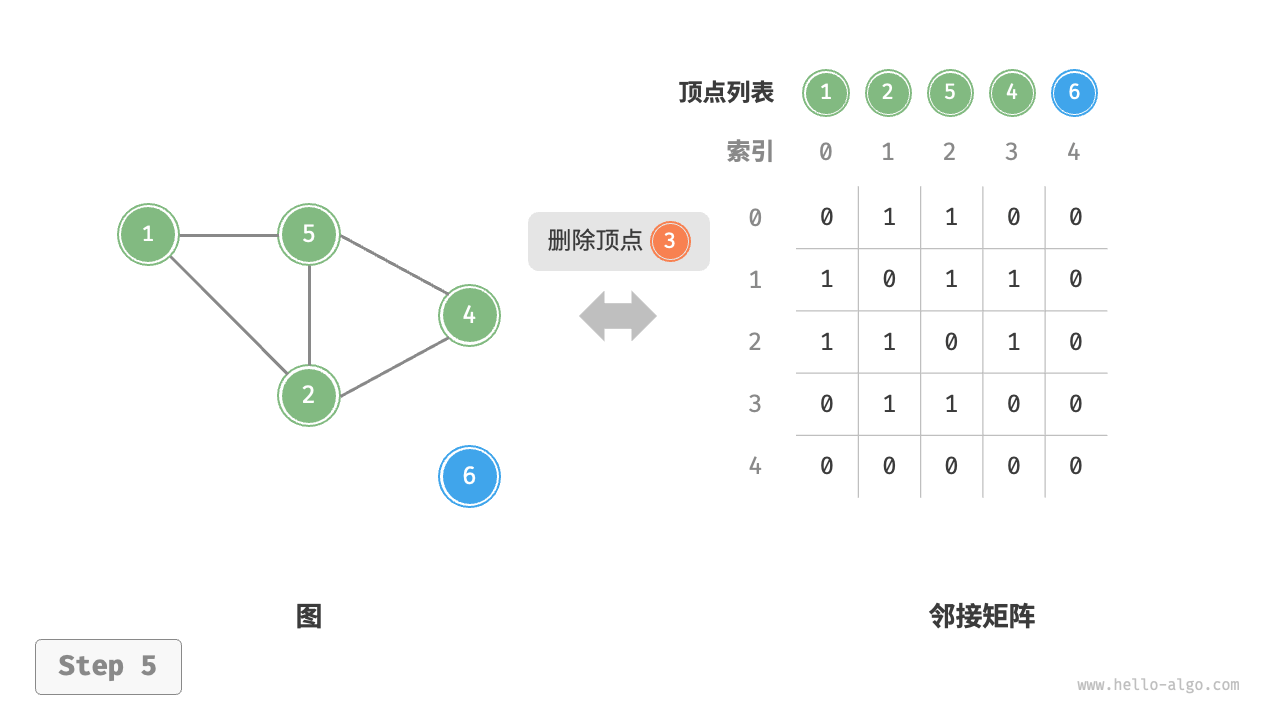
给定一个顶点数量为 \(n\) 的无向图,则各种操作的实现方式如下图所示。
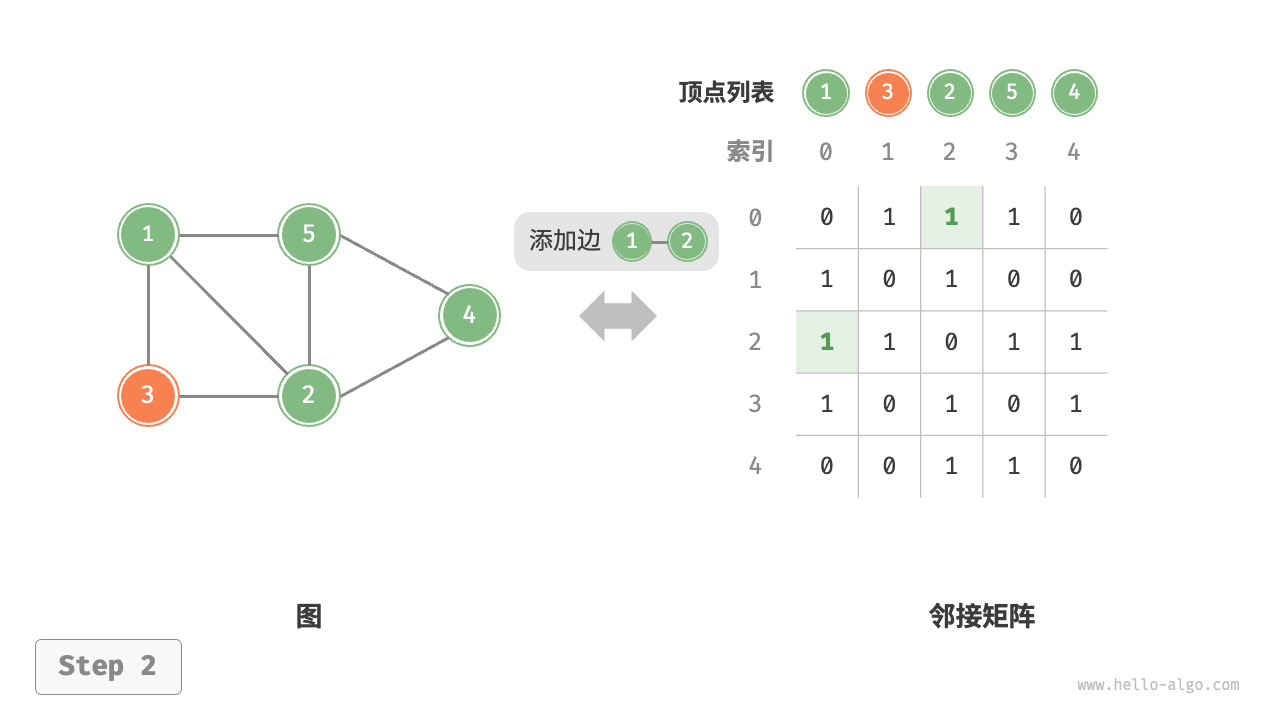
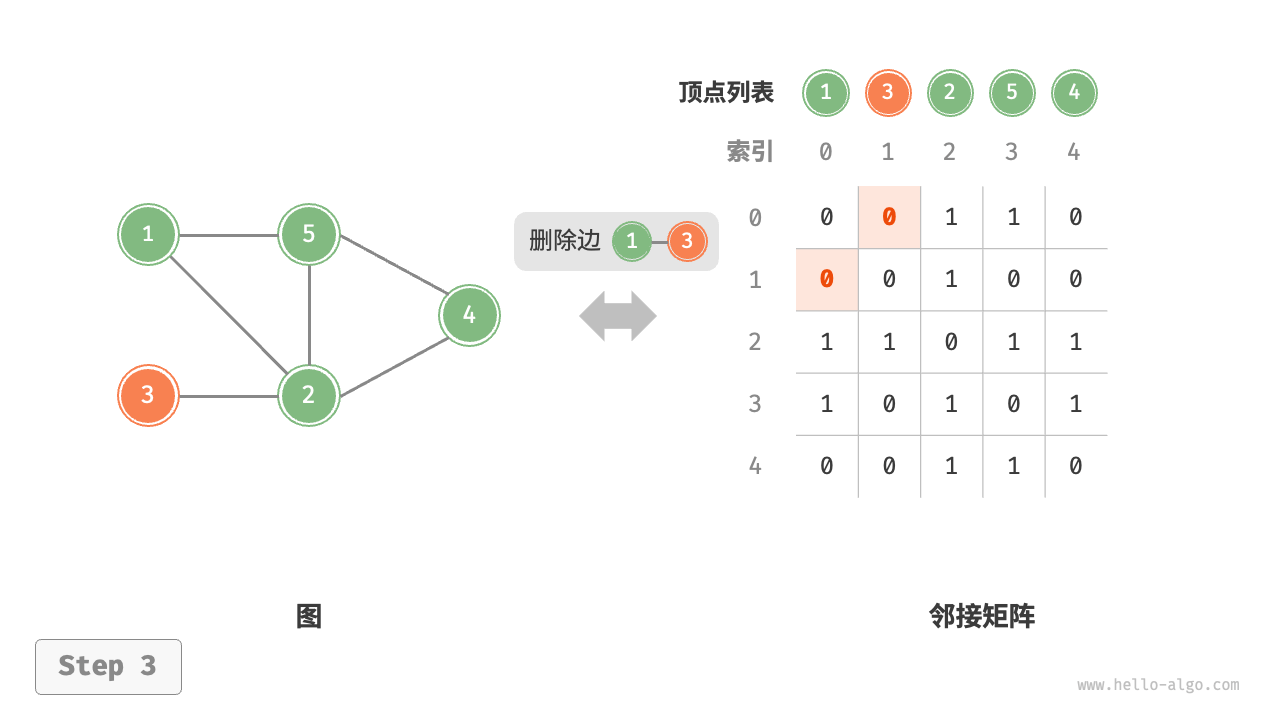
- 添加或删除边:直接在邻接矩阵中修改指定的边即可,使用 \(O(1)\) 时间。而由于是无向图,因此需要同时更新两个方向的边。
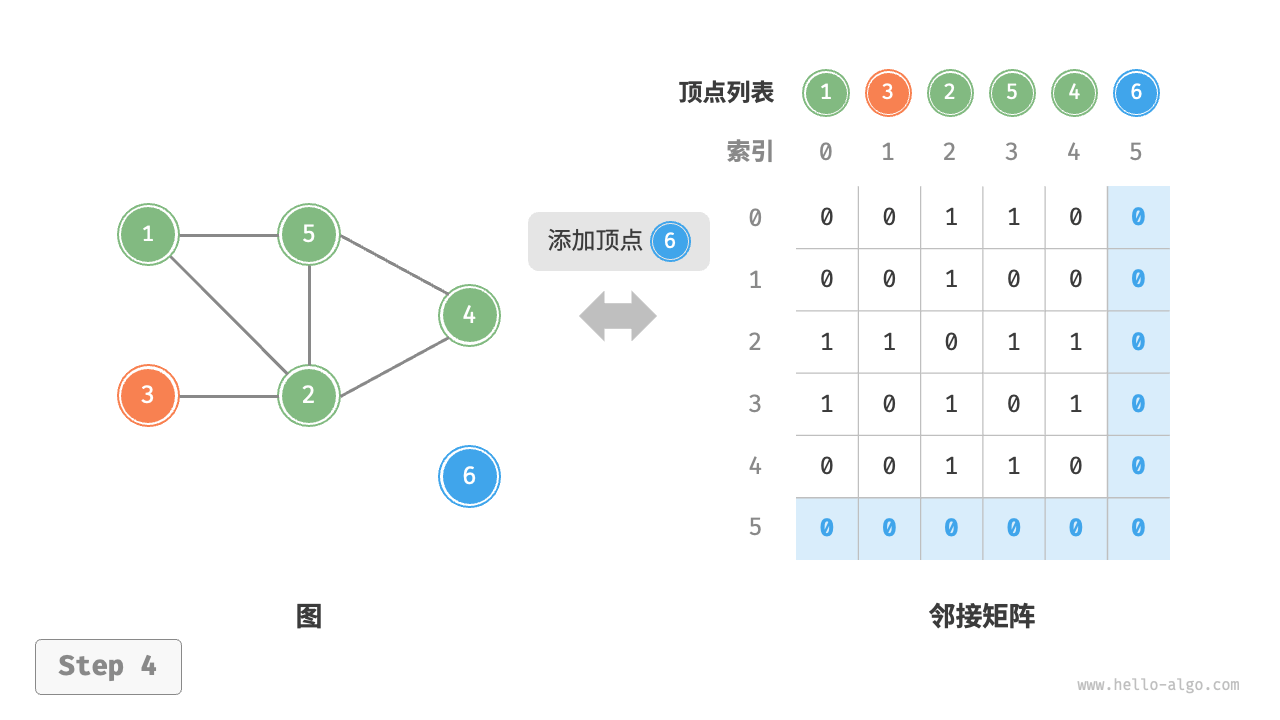
- 添加顶点:在邻接矩阵的尾部添加一行一列,并全部填 \(0\) 即可,使用 \(O(n)\) 时间。
- 删除顶点:在邻接矩阵中删除一行一列。当删除首行首列时达到最差情况,需要将 \((n-1)^2\) 个元素“向左上移动”,从而使用 \(O(n^2)\) 时间。
- 初始化:传入 \(n\) 个顶点,初始化长度为 \(n\) 的顶点列表
vertices,使用 \(O(n)\) 时间;初始化 \(n \times n\) 大小的邻接矩阵adjMat,使用 \(O(n^2)\) 时间。
以下是基于邻接矩阵表示图的实现代码:
graph_adjacency_matrix.py
class GraphAdjMat:
"""基于邻接矩阵实现的无向图类"""
def __init__(self, vertices: list[int], edges: list[list[int]]):
"""构造方法"""
# 顶点列表,元素代表“顶点值”,索引代表“顶点索引”
self.vertices: list[int] = []
# 邻接矩阵,行列索引对应“顶点索引”
self.adj_mat: list[list[int]] = []
# 添加顶点
for val in vertices:
self.add_vertex(val)
# 添加边
# 请注意,edges 元素代表顶点索引,即对应 vertices 元素索引
for e in edges:
self.add_edge(e[0], e[1])
def size(self) -> int:
"""获取顶点数量"""
return len(self.vertices)
def add_vertex(self, val: int):
"""添加顶点"""
n = self.size()
# 向顶点列表中添加新顶点的值
self.vertices.append(val)
# 在邻接矩阵中添加一行
new_row = [0] * n
self.adj_mat.append(new_row)
# 在邻接矩阵中添加一列
for row in self.adj_mat:
row.append(0)
def remove_vertex(self, index: int):
"""删除顶点"""
if index >= self.size():
raise IndexError()
# 在顶点列表中移除索引 index 的顶点
self.vertices.pop(index)
# 在邻接矩阵中删除索引 index 的行
self.adj_mat.pop(index)
# 在邻接矩阵中删除索引 index 的列
for row in self.adj_mat:
row.pop(index)
def add_edge(self, i: int, j: int):
"""添加边"""
# 参数 i, j 对应 vertices 元素索引
# 索引越界与相等处理
if i < 0 or j < 0 or i >= self.size() or j >= self.size() or i == j:
raise IndexError()
# 在无向图中,邻接矩阵关于主对角线对称,即满足 (i, j) == (j, i)
self.adj_mat[i][j] = 1
self.adj_mat[j][i] = 1
def remove_edge(self, i: int, j: int):
"""删除边"""
# 参数 i, j 对应 vertices 元素索引
# 索引越界与相等处理
if i < 0 or j < 0 or i >= self.size() or j >= self.size() or i == j:
raise IndexError()
self.adj_mat[i][j] = 0
self.adj_mat[j][i] = 0
def print(self):
"""打印邻接矩阵"""
print("顶点列表 =", self.vertices)
print("邻接矩阵 =")
print_matrix(self.adj_mat)
基于邻接表的实现¶
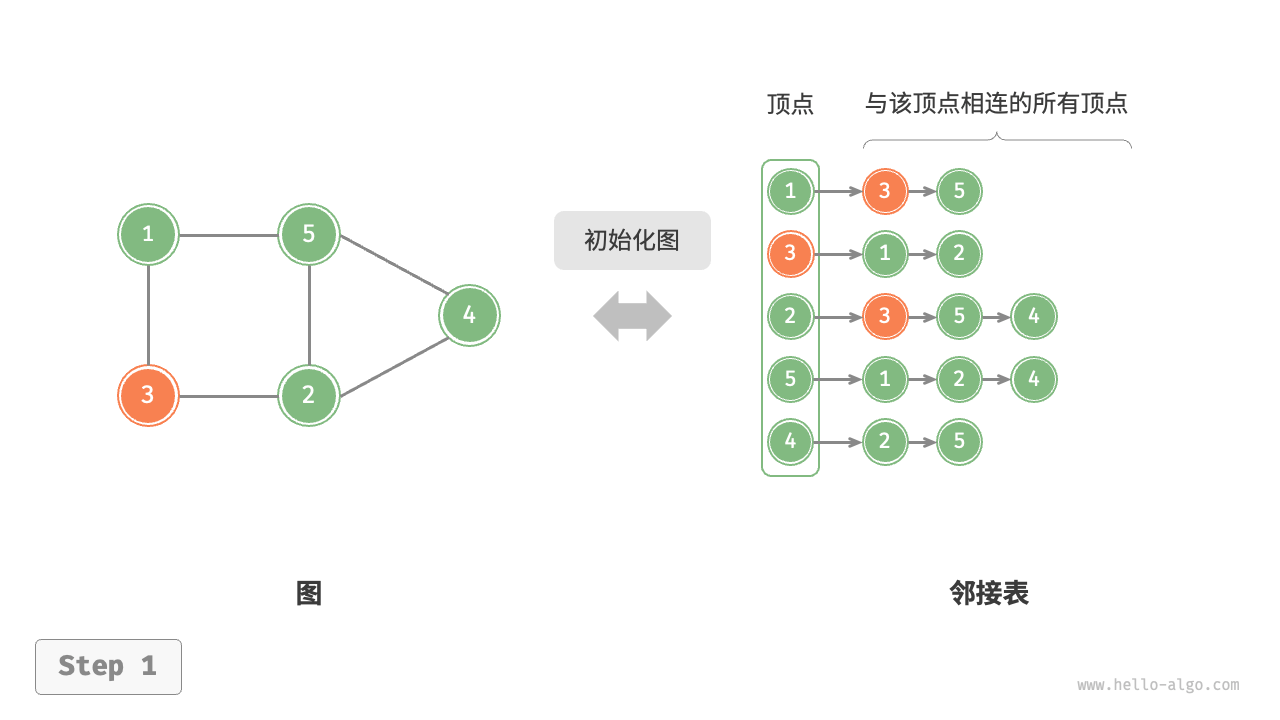
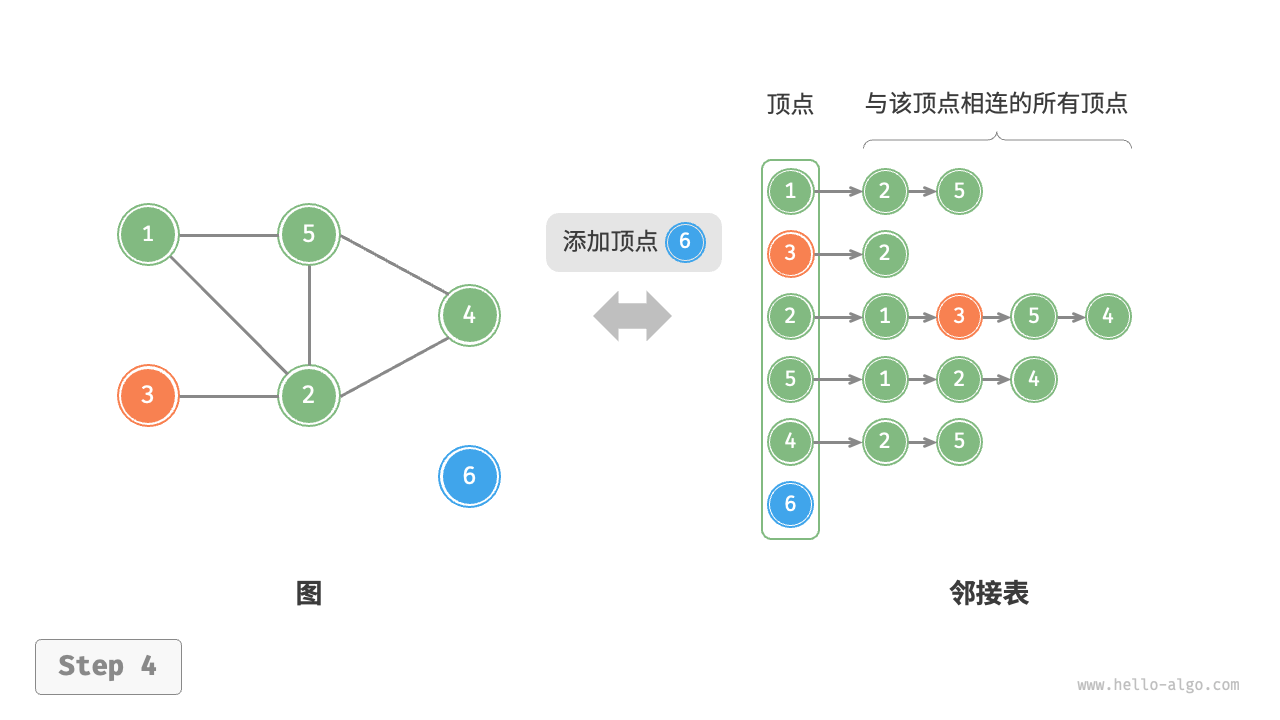
设无向图的顶点总数为 \(n\)、边总数为 \(m\) ,则可根据下图所示的方法实现各种操作。
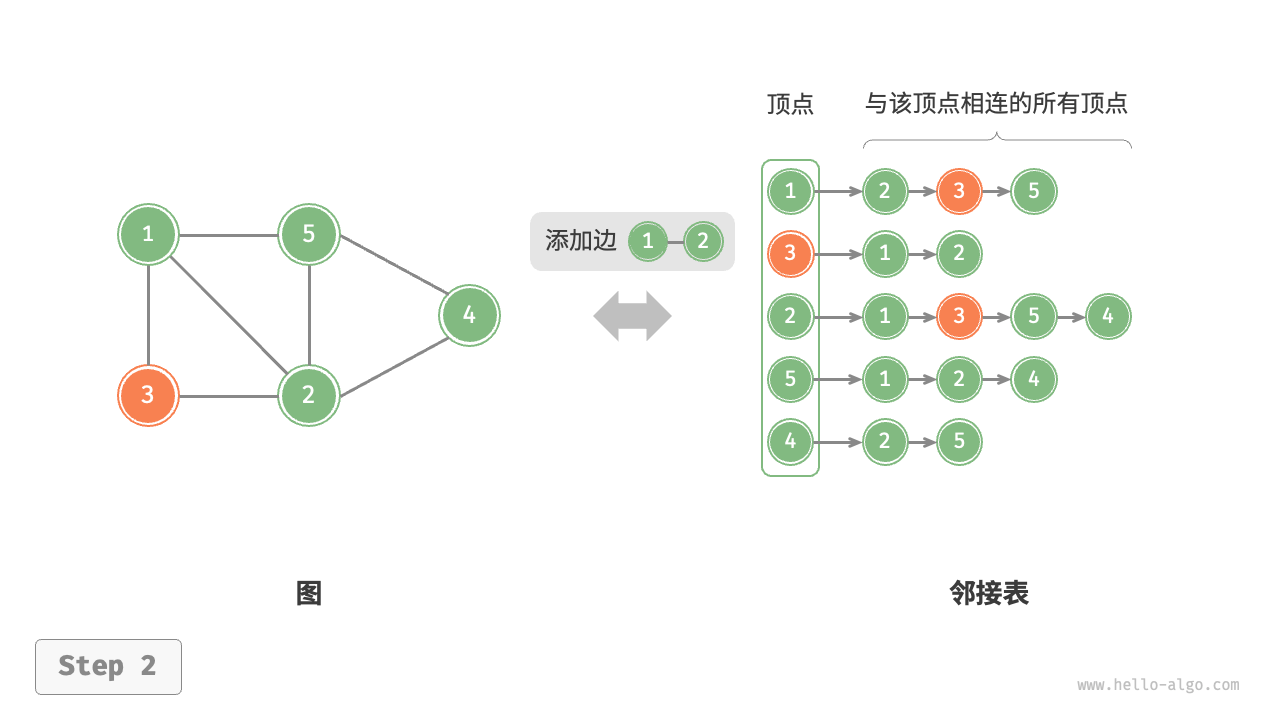
- 添加边:在顶点对应链表的末尾添加边即可,使用 \(O(1)\) 时间。因为是无向图,所以需要同时添加两个方向的边。
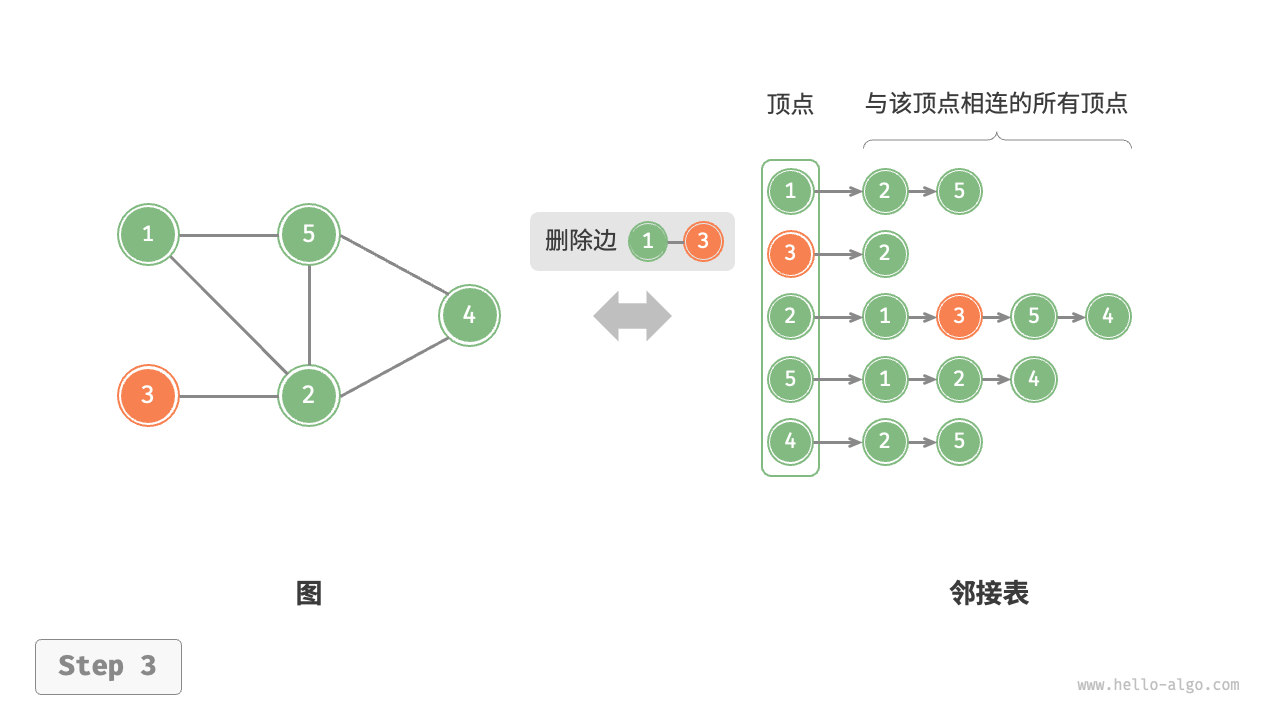
- 删除边:在顶点对应链表中查找并删除指定边,使用 \(O(m)\) 时间。在无向图中,需要同时删除两个方向的边。
- 添加顶点:在邻接表中添加一个链表,并将新增顶点作为链表头节点,使用 \(O(1)\) 时间。
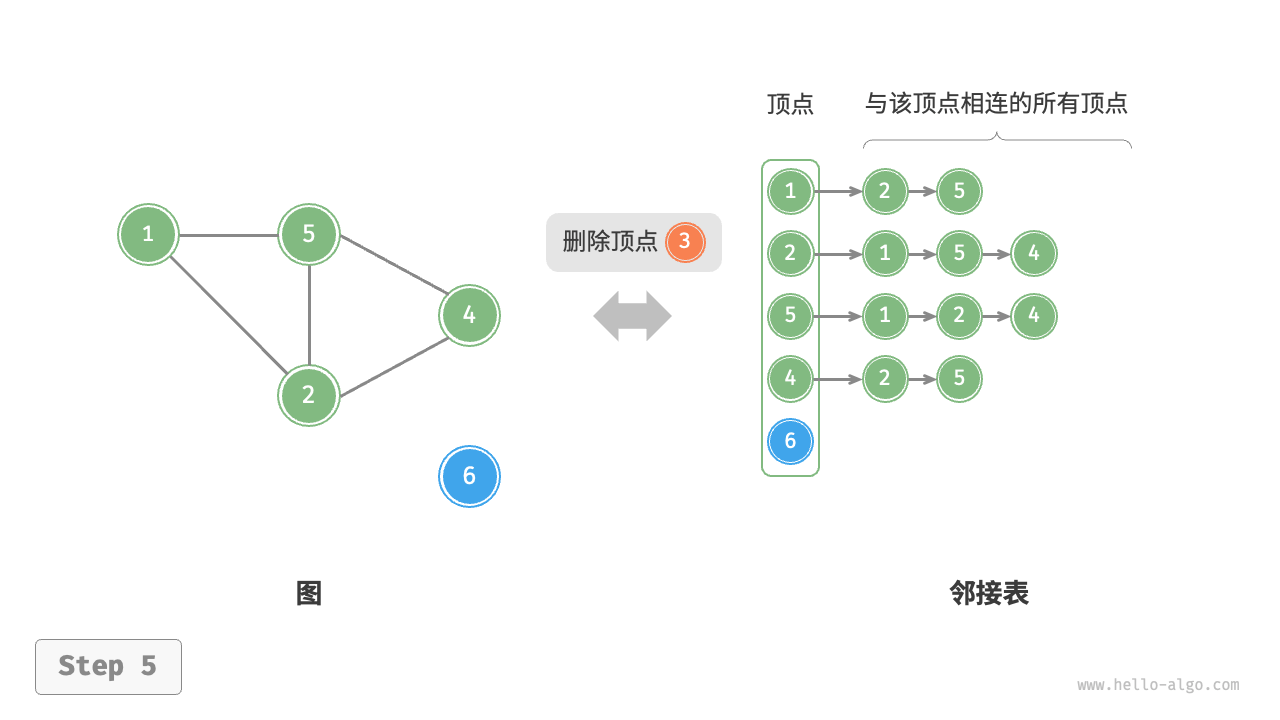
- 删除顶点:需遍历整个邻接表,删除包含指定顶点的所有边,使用 \(O(n + m)\) 时间。
- 初始化:在邻接表中创建 \(n\) 个顶点和 \(2m\) 条边,使用 \(O(n + m)\) 时间。
以下是邻接表的代码实现。对比上图,实际代码有以下不同。
- 为了方便添加与删除顶点,以及简化代码,我们使用列表(动态数组)来代替链表。
- 使用哈希表来存储邻接表,
key为顶点实例,value为该顶点的邻接顶点列表(链表)。
另外,我们在邻接表中使用 Vertex 类来表示顶点,这样做的原因是:如果与邻接矩阵一样,用列表索引来区分不同顶点,那么假设要删除索引为 \(i\) 的顶点,则需遍历整个邻接表,将所有大于 \(i\) 的索引全部减 \(1\) ,效率很低。而如果每个顶点都是唯一的 Vertex 实例,删除某一顶点之后就无须改动其他顶点了。
graph_adjacency_list.py
class GraphAdjList:
"""基于邻接表实现的无向图类"""
def __init__(self, edges: list[list[Vertex]]):
"""构造方法"""
# 邻接表,key:顶点,value:该顶点的所有邻接顶点
self.adj_list = dict[Vertex, list[Vertex]]()
# 添加所有顶点和边
for edge in edges:
self.add_vertex(edge[0])
self.add_vertex(edge[1])
self.add_edge(edge[0], edge[1])
def size(self) -> int:
"""获取顶点数量"""
return len(self.adj_list)
def add_edge(self, vet1: Vertex, vet2: Vertex):
"""添加边"""
if vet1 not in self.adj_list or vet2 not in self.adj_list or vet1 == vet2:
raise ValueError()
# 添加边 vet1 - vet2
self.adj_list[vet1].append(vet2)
self.adj_list[vet2].append(vet1)
def remove_edge(self, vet1: Vertex, vet2: Vertex):
"""删除边"""
if vet1 not in self.adj_list or vet2 not in self.adj_list or vet1 == vet2:
raise ValueError()
# 删除边 vet1 - vet2
self.adj_list[vet1].remove(vet2)
self.adj_list[vet2].remove(vet1)
def add_vertex(self, vet: Vertex):
"""添加顶点"""
if vet in self.adj_list:
return
# 在邻接表中添加一个新链表
self.adj_list[vet] = []
def remove_vertex(self, vet: Vertex):
"""删除顶点"""
if vet not in self.adj_list:
raise ValueError()
# 在邻接表中删除顶点 vet 对应的链表
self.adj_list.pop(vet)
# 遍历其他顶点的链表,删除所有包含 vet 的边
for vertex in self.adj_list:
if vet in self.adj_list[vertex]:
self.adj_list[vertex].remove(vet)
def print(self):
"""打印邻接表"""
print("邻接表 =")
for vertex in self.adj_list:
tmp = [v.val for v in self.adj_list[vertex]]
print(f"{vertex.val}: {tmp},")
效率对比¶
设图中共有 \(n\) 个顶点和 \(m\) 条边,下表对比了邻接矩阵和邻接表的时间效率和空间效率。
表
| 邻接矩阵 | 邻接表(链表) | 邻接表(哈希表) | |
|---|---|---|---|
| 判断是否邻接 | \(O(1)\) | \(O(m)\) | \(O(1)\) |
| 添加边 | \(O(1)\) | \(O(1)\) | \(O(1)\) |
| 删除边 | \(O(1)\) | \(O(m)\) | \(O(1)\) |
| 添加顶点 | \(O(n)\) | \(O(1)\) | \(O(1)\) |
| 删除顶点 | \(O(n^2)\) | \(O(n + m)\) | \(O(n)\) |
| 内存空间占用 | \(O(n^2)\) | \(O(n + m)\) | \(O(n + m)\) |
观察上表,似乎邻接表(哈希表)的时间效率与空间效率最优。但实际上,在邻接矩阵中操作边的效率更高,只需一次数组访问或赋值操作即可。综合来看,邻接矩阵体现了“以空间换时间”的原则,而邻接表体现了“以时间换空间”的原则。